The camera has been confirmed to work with Raspberry Pi 5, Raspberry Pi Zero 2 W and Orange Pi 5.
Connection Diagram
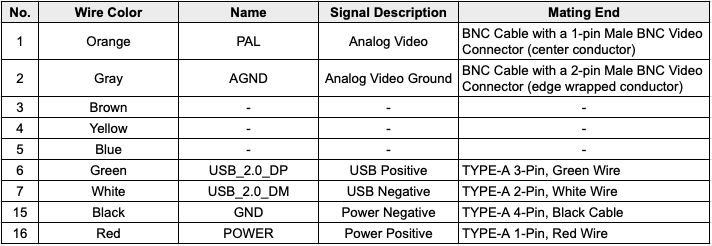
- Solder the USB cable to the camera harness according to the pinout:
Camera wire USB wire Signal Red Red Power Positive Black Black Power Negative Green Green USB_2.0_DP White White USB_2.0_DM - Insert the cable into the USB connector on the board.
- Checking the Camera in the Console

- Install the required utilities
sudo apt update && sudo apt install -y v4l-utils ffmpeg - Verify that the camera is detected.
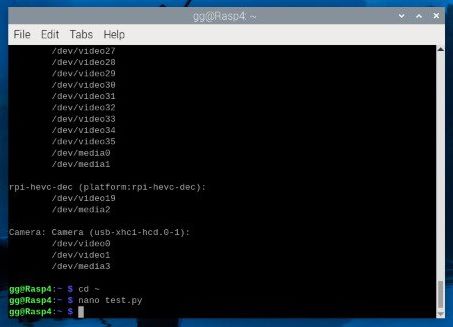
Run the command below and look for a block whose name in parentheses starts with usb-… — this is your USB camera.
The first line under that block (usually /dev/video0) is the video node you should use.
If no such block appears, the system did not recognise the camera; check the cable, power supply, or reconnect the device.v4l2-ctl --list-device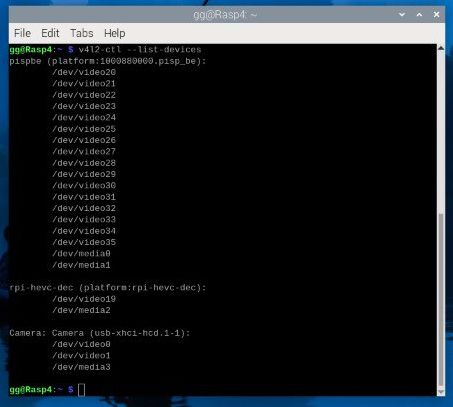
- Display the camera image
ffplay -f v4l2 -video_size 640x512 -i /dev/video0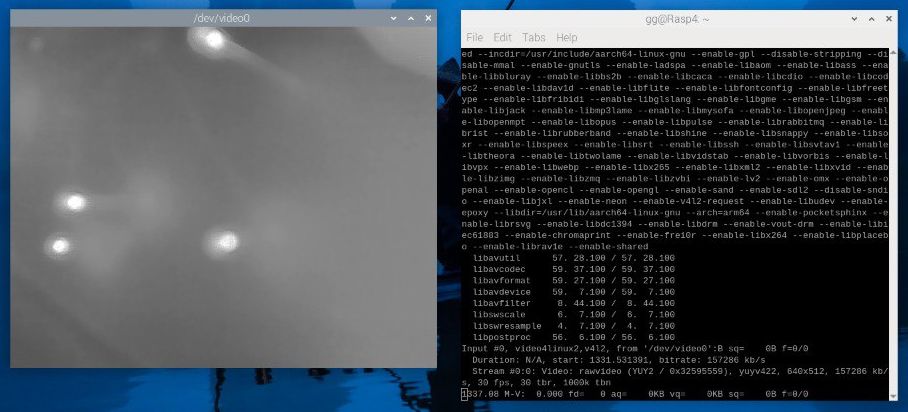
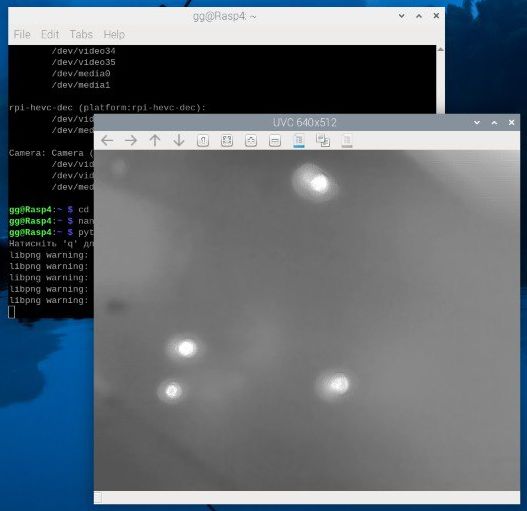
Additional Check via Python + OpenCV
- Install the required packages
sudo apt updatesudo apt install -y python3-opencv python3-numpy v4l-utils - Verify that the camera is detected.
Run the command below and look for a block whose name in parentheses starts with usb-… — this is your USB camera.
The first line under that block (usually /dev/video0) is the video node you should use.
If no such block appears, the system did not recognise the camera; check the cable, power supply, or reconnect the device.v4l2-ctl --list-devices - Go to your home directory
cd ~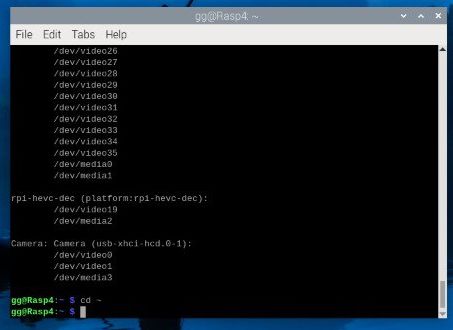
- Create a test file
nano test.py
- Paste the following code:
import cv2import timeDEVICE = "/dev/video0" # замініть, якщо іншій нодWIDTH, HEIGHT = 640, 512cap = cv2.VideoCapture(DEVICE, cv2.CAP_V4L2)cap.set(cv2.CAP_PROP_FRAME_WIDTH, WIDTH)cap.set(cv2.CAP_PROP_FRAME_HEIGHT, HEIGHT)if not cap.isOpened():raise IOError(f"Не вдалося відкрити {DEVICE}")print("Натисніть 'q' для виходу")t0, frames = time.time(), 0while True:ret, frame = cap.read()if not ret:print("Кадр не зчитано"); breakcv2.imshow("UVC 640×512", frame)frames += 1if cv2.waitKey(1) & 0xFF == ord('q'):breakprint(f"Середній FPS: {frames / (time.time() - t0):.1f}")cap.release()cv2.destroyAllWindows()
- Save code → Ctrl + O, Enter, вийдіть → Ctrl + X.
- Run the file
python3 test.py