Загальні відомості
-
Роздільна здатність: 256 x 192 пікселів
-
Сигнал: аналоговий CVBS, USB
-
Живлення: 5В
-
Кут огляду: 50° (горизонтальний), 37.2° (вертикальний)
-
Піксель: 12 мкм
-
Діапазон хвиль: 8-14 мкм
-
Температурний діапазон використання: -20°C до +60°C
Можливості інтеграції камери з польотним контролером
Тепловізійна камера підтримує підключення до польотного контролера через UART і сумісна з протоколом Mavlink для отримання AUX-команд.
Це дозволяє налаштовувати параметри камери безпосередньо з пульта управління пілота. Підтримуються такі параметри для керування:
-
Перемикання профілів роботи камери
-
Автоматичне або ручне керування затвором
-
Яскравість зображення
-
Контрастність зображення
Схема підключення
переконайтеся що наданий шлейф відповідає розпіновці як на зображенні
|

Схема підключення до літника на прикладі Vyriy:
 Налаштування відповідного порту UART
Налаштування відповідного порту UART
Щоб налаштувати підключення між польотним контролером і камерою, необхідно активувати Mavlink для відповідного UART на польотному контролері

Налаштування каналів
Щоб налаштувати відповідність каналів, тобто визначити, яка функція буде прив’язана до конкретного перемикача, можна скористатися Betaflight Configurator.

Введіть наступну команду для налаштування мосту між CLI-інтерфейсом і камерою:
serialpassthrough X 115200
Де X – це номер UART, до якого підключена камера.
Для прикладу якщо налаштований на 3 UART прописуємо -1serialpassthrough 2 115200
Зверніть увагу, що на деяких польотних контролерах номер UART, вказаний на платі, може не відповідати тому, який потрібно вказувати у цій команді. Тому спочатку ознайомтеся з документацією до польотного контролера або визначте номер експериментально.
Якщо у вас не піднявся mavlink?
У версій Betaflight починаючи з версії 4.4 вимкнена mavlink телеметрія, це не розповсюджується на MilBeta, Crashdetect, Karma BF, iNav, щоб змінити це налаштування під час прошивки вкажіть TELEMETRY_MAVLINK в CUSTOM DEFINES під час прошивки

Фічі камери
profile
Перемикання між перед налаштованими профілями
Приклад:
set aux profile 6 1000 2000
image_contrast
Управління контрастністю камери
Приклад:
set aux image_contrast 4 1000 2000
image_brightness - управління яскравістю камери.
Приклад:
set aux image_brightness 5 1000 2000
shutter_off
Вимкнення автоматичного спрацювання шторки, типово 45с
Приклад:
set aux shutter_off 7 1400 2000
Перевизначення каналу керування камерою (set aux)
Для Betaflghth у вашому розпорядженню перші 8 каналів, для iNav/Artupilit такі обмеження відсутні. Типово керування каналами налаштовано на 7 канал, або 3 aux, якщо потрібно налаштувати на інший канал слідуйте наступним крокам:
-
увімкніть монітор та апаратуру
-
приєднайте борт до betaflight через кабель
-
заживіть борт через батарею
-
дочекайтеся коли камера завантажиться
-
перейдіть у вкладку CLI в програмі Betaflight
-
переводимо камеру в режим маршрутизації через команду в CLI де 2 це номер uart до якого припаяні керування камери -1 для Karma/Speedybee, в прикладі UART 3
serialpassthrough 2 115200 -
наступна команда перехід в CLI режим
switch to cli mode -
перевизначаємо канал який слухатиме камера для керування профілями де 6 це номер каналу -1, в прикладі 7 канал
set aux profile 6 1000 2000 -
виходимо з CLI, від'єднуємо USB, вимикаємо живлення
Щоб польотний контролер на Betaflight перейшов із режиму serialpassthrough у стандартний режим, його необхідно перезавантажити, відключивши від живлення та USB.
Робота з USB інтерфейсом
-
Під'єднайте камеру до USB (живлення також можна брати з USB)
-
Система розпізнає її як мережевий інтерфейс з IP-адресою 10.0.0.2, маскою підмережі 255.0.0.0 та шлюзом 10.0.0.1. Переконайтеся, що в налаштуваннях мережі ці параметри встановлено саме так.
Залежно від операційної системи спосіб введення чи перевірки цих даних може відрізнятися, однак необхідно вказати саме ці значення. - Після того як усе буде під’єднано й мережу налаштовано, камера надсилатиме UDP-пакети з кадрами на порт 5000.

Кожен байт - це піксель, тобто всього приходить 256 * 192 = 49,152 байта на кадр в одному upd пакеті. Ніякого стиснення. Це не RTP, а звичайний буфер по UDP
Щоб швидко побачити картинку, цей буфер можна зберегти в файл, і потім конвертувати в картинку:
ffmpeg -f rawvideo -pixel_format y8 -video_size 512x192 -i image.raw -frames:v 1 -vf "format=gray" image.bmp
або скористайтеся Python прикладом коду для отримання відео
import socket
import cv2
import numpy as np
udp_socket = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
udp_socket.bind(('0.0.0.0', 5000))
print("Listening on UDP port 5000...")
while True:
data, _ = udp_socket.recvfrom(65536)
if len(data) == 256 * 192:
frame = np.frombuffer(data, dtype=np.uint8).reshape((192, 256))
frame_resized = cv2.resize(frame, (720, 576), interpolation=cv2.INTER_LINEAR)
cv2.imshow("Y8 Video", frame_resized)
if cv2.waitKey(1) == 27:
break
cv2.destroyAllWindows()
Монтаж камери на борт
За посиланням Курбас-256 кріплення ви знайдете 3 версії кріплення камери на борт, камера кріпиться болтом M3x30 та контргайкою М3 або для фіксації нанести фіксатор різьби на гайку без фіксатора. Орієнтуйтеся на те що шлейф приєднується в нижній частині камери.

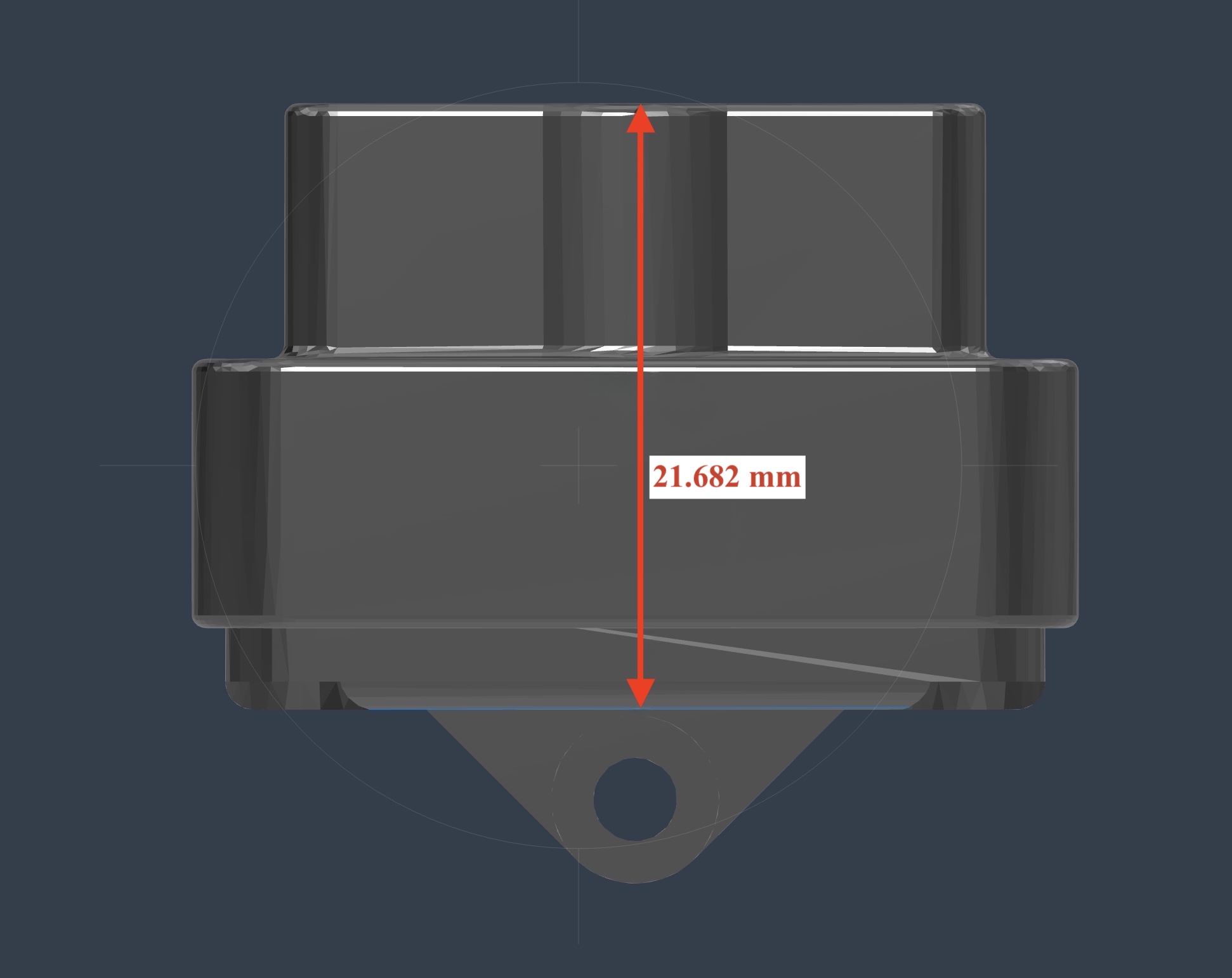
Габаритне креслення виробу
.jpg)